Carrera Structo Jeep Renegade




| Hersteller | Fertigbausatz: Carrera Structo Erbauer: V. Pippan |
|---|---|
| Aufgabe | Straßenauto |
| Maßstab | 1 : 10 |
| Länge | 350 mm |
| Breite | 173 mm |
| Höhe | 130 mm |
| minimale Bodenfreiheit | 0 mm bei voll eingefederter Vorderachse |
| Masse | 1,57 kg fahrbereit mit Antriebsakku |
| Massenverteilung Vorder-/Hinterachse | …/… % |
| Radaufhängung | vorne: Doppelquerlenker ungedämpft hinten: Pendelnde Starrachse gefedert und ungedämpft |
| Radstand | 223 mm |
| Spurweite | ca. 141 mm |
| Lenkwinkel | …° |
| Motor | Absima Thrust Eco 540er mit 21 Windungen (absima.shop) 6S NiMH 4600 mAh Akku |
| Masse-Leistungs-Verhältnis | 8,7 kg/kW mit max. Motorleistung bei Beschleunigung aus dem Stand, gemessen am Akku |
| Getriebeübersetzung | 9,9:1 |
| Höchstgeschw. | ca. 32,9 km/h auf ebenem Asphalt (GPS gemessen) |
| Jungfernfahrt | … |
| Fahrzeit | 2:52 seit 2003 Stand Anfang 2023 |
Folgende Getriebeübersetzungen stehen zur Auswahl:
- 20,17:1
Motorritzel: 12 Zähne, Zwischenrad: 44 und 10 Zähne, Differentialrad: 55 Zähne - 13,75:1
Motorritzel: 16 Zähne, Zwischenrad: 40 und 10 Zähne, Differentialrad: 55 Zähne - 9,9:1
Motorritzel: 20 Zähne, Zwischenrad: 36 und 10 Zähne, Differentialrad: 55 Zähne - 3,44:1
Motorritzel: 16 Zähne, Differentialrad: 55 Zähne
Mit diesem Modell habe ich wohl meine ersten Fernsteuererfahrungen überhaupt gemacht. Es ist so lange her, daß ich mich nicht einmal mehr daran erinnern kann. Sogar am Strand in Italien
kam es zum Einsatz.
Nach vielen Jahren unbenutzt im Keller machte ich dieses Modell Ende 2013 wieder fahrbereit. Das Modell wurde komplett zerlegt, alle Teile gereinigt, entrostet und anschließend wieder zusammengebaut.
Natürlich lies ich es mir nicht nehmen dabei ein paar Verbesserungen durchzuführen.
In verschiedenen Schachteln und Ablagen konnte ich, nach über 25 Jahren, noch alle Zahnräder für die verschiedenen Übersetzungen, Teile des mitgelieferten Werkzeugs und den Bauplan ausfindig machen. Das freut mich
besonders, denn somit ist das Modell nahezu komplett. Und die verschiedenen Übersetzungen sind natürlich besonders interessant.
Verbesserungen am Modell:
- Befestigung der Vorderradaufhängung und vorderes Chassis versteift
- Übertragung des Antriebsmoments an der Hinterachse verbessert
- Einfache Federung und Stabilisator für die Hinterachse
- Kunststoff Radlager durch Kugellager ersetzt
- Mechanischen Regler durch einen modernen elektronischen Regler mit BEC ersetzt
- Tuning Motor mit weniger Windungen
- Modernes Lenkservo
Die Befestigung der vorderen Radaufhängung am Chassis wurde versteift (Bild 1) und die Hinterachse erhielt eine Bohrung, um das Moment für das linke Hinterrad formschlüssig (und nicht nur reibschlüssig)
über einen Stift zu übertragen. Weiters ersetzte ich die einfachen Kunststoff Radlager durch Kugellager. Vorallem an der Hinterachse war dies dringend nötig, denn an den Lagerstellen ist die
Welle schon mehrere Zehntel Millimeter tief eingelaufen, trotz der Kunststoff/Stahl Lagerpaarung. Dies liegt sicher auch am relativ harten Kunststoff (kein Teflon?) und dem recht weichem und ungehärtetem Stahl der Welle.
Der originale mechanische Regler wurde ebenfalls durch einen modernen Regler Absima ECU-1 mit BEC ersetzt.
Dadurch läßt sich das Modell feinfühliger steuern, es entfällt ein Servo, der Lastwiderstand und der Empfängerakku.
Um den gesamten Antriebsstrang zu schonen (Ersatzteile sind kaum mehr zu bekommen) entschied ich mich für einen Bürstenmotor mit 21 Windungen. Ich hoffe damit werden die Komponenten nicht zu sehr beansprucht,
ursprünglich hatte ich ja über einen modernen Bürstenlosen Antrieb nachgedacht.
Das Fahrverhalten des Modells ist recht eigenwillig. Die Vorderachse mit gefederter Einzelradaufhängung hat gute Bodenhaftung, aber durch die ungefederte hintere Starrachse neigt das Modell zum springen an der Hinterachse.
Dies ist natürlich nicht ideal, auch in Verbindung mit dem stärkeren Motor. Und es sieht auch recht komisch aus, wenn das Heck während der Fahrt umherhüpft. Beim fahren auf sehr glatten Böden, zum Beispiel in der Halle,
sicher noch kein Problem, aber bereits auf Asphalt am Parkplatz hüpft das Heck beträchtlich.
Um hier etwas Abhilfe zu schaffen, habe ich eine Federung für das Heck realisiert (Bild 2) und das Chassis über einen Stabilisator an der Hinterachse (Bild 3) abgestützt.
 Bild 1: Versteifung des vorderen Chassis und der Radaufhängung
Bild 1: Versteifung des vorderen Chassis und der Radaufhängung
 Bild 2: Einfache Federung der Hinterachse
Bild 2: Einfache Federung der Hinterachse
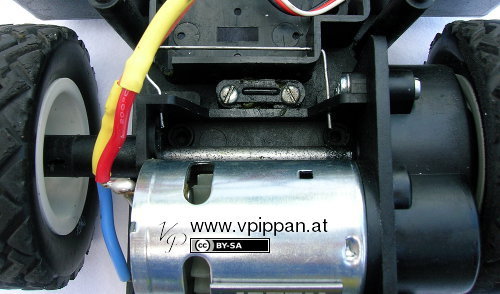 Bild 3: Stabilisator
Bild 3: Stabilisator
Durch die neue Motor/Regler Kombination beträgt die Höchstgeschwindigkeit nun 32,9 km/h bei einer maximalen Leistungsaufnahme von ca. 180,5 W (bei Beschleunigung aus dem Stand und gemessen am Akku).

Bild oben: Das Modell und ich im Alter von 2,5 Jahren
Bild unten: Ca. 30 Jahre später

Links
- Carrera Structo Jeep Renegade 2WD (tamiyaclub.com)
- 90340 Jeep Renegade (servowiki.de)
Videos vom Modell
- Vintage RC Collection video. 1978-1982 Part 1/5: Tamiya RC, Kyosho RC, Nikko toys, ferngesteuerte Autos [Rccarlover Luxembourg, 2016-05-27] (Youtube)
