Allgemeines
Beim Conrad sah ich ein fertiges Lichtsystem und dachte mir: gute Sache, schnell eingebaut, nicht viel Arbeit und funktioniert sofort. Nach ein paar Flügen mußte ich dann feststellen, daß es doch nett wäre, die Lichter über den Sender Ein- und Auszuschalten.
Außerdem sollte die Stromversorgung vom Empfänger Akku getrennt, über einen kleinen LiPo Akku erfolgen. Somit war auch noch ein Spannungsregler notwendig.
Also warum nicht gleich das Modul durch einen Eigenbau ersetzen, der alles nötige auf einer Platine hat?
Mögliche Änderungen für eine neue Version:
- Fuse Einstellungen vom μC dokumentieren
- kleinere Stecker für Lichtanschlüsse und ISP (1,27 mm Raster)
- Version ohne Jeti Unterstützung, da hier kaum notwendig
- Beim Transistor für Positionslichter Platz für einen dritten Widerstand und Anschluss schaffen (z. B. für ein weißes Licht)
- 2. Empfängersignal Eingang (z. B. Für das Fahrwerksignal → automatische Ansteuerung vom Landelicht)
- Schaltung mit 0805 Bauteilen und kleineren Leiterbahnbreiten neu Layouten
- Zusätzliche Ausgangskanäle
- Verpolungsschutz und Sicherung bei der Spannungsversorgung
- Filter an Lichtausgängen um Einstreuungen durch lange LED Leitungen zu verhindern
- Statt Spannungsteiler ein Trimmpoti für bessere Einstellung der Akku Überwachung
- Alle nicht benötigten Teile des μC in der Software abschalten
- μC über Spannungsregler und LEDs direkt vom Empfängerakku (bzw. über Empfängerspannungsregler) versorgen → eventuell auswählbar machen?
Entsprechend der Open Source Hardware Philosophie stehen alle Projektdaten unter einer CC-BY-SA und die Software unter GPL Lizenz.
Auf Anfrage stelle ich gerne einen Bausatz dieser Schaltung für Sie zusammen.
Für Fragen, Anregungen, Erfahrungsaustausch, Probleme, Beschwerden, um über das Projekt zu diskutieren, etc. schreiben Sie doch eine E-Mail direkt an mich.
Hardware
Die Ströme und Spannungen an den LEDs, mit dem Conrad Modul, konnte ich einfach durch messen bestimmen. Mit diesen Werten und bei geg. Eingangsspannung kann man sich dann leicht die notwendigen Vorwiderstände, für die LEDs, ausrechnen.
Als μC dient ein ATtiny2313 der für diesen Zweck mehr als genug Pins zur Verfügung stellt. Da diese Schaltung keine besonderen Timing Anforderungen hat, verzichte ich auf einen externen Quarz (Gewicht und Platz). Der interne Taktgenerator ist hier ausreichend.
Die LEDs werden dann vom μC über MOSFETs geschalten. Zusätzlich überwacht der μC die Spannug des Akkus, damit ein zu tiefes entladen des LiPo vermieden wird. Bei zu geringer Akku Spannung wird die Beleuchtung einfach abgeschalten.
Da Sicherheit in der Luftfahrt immer an erster Stelle steht, ist das gesamte Beleuchtungssystem über Optokoppler vom Empfänger getrennt und verfügt über eine eigene Stromversorgung.
Die Vorwiderstände an den Optokopplern (R17, R20, R21) sind für eine max. Spannung von 6V ausgelegt. Bei Verwendung von höheren Versorgungsspannungen des Empfängers im Modell sind diese Widerstände zu ändern!
Optional enthält die Schaltung eine Schnittstelle zum Jeti Duplex System. Die dafür notwendige Schaltung ist bereits auf der Platine integriert und kann bei Bedarf bestückt werden. Diese Schnittstelle ist allerdings als experimentell zu betrachten,
da ich mit dem Jeti System noch keinerlei Erfahrung habe und selber erst alles nötige herausfinden muß! Natürlich kann die Schaltung auch ohne das Jeti System verwendet werden.
Die Schaltung kann auch als Schaltmodul für DC Verbraucher verwendet werden. Dazu müssen nur die LED Vorwiderstände (R3 bis R10) überbrückt werden. Zu Beachten ist dabei jedoch, daß die max. möglichen Ströme (Spannungsregler, MOSFET's und Leiterbahnbreiten) nicht überschritten werden. Beispielberechnungen sind im PDF Dokument bei den Downloads zu finden. Durch die Verwendung eines μC ist es auch möglich, verschiedene Schaltabläufe (automatisch ablaufend) über den Sender zu aktivieren. Zur Steuerung eines Ablaufes muß nur der μC entsprechend programmiert werden.
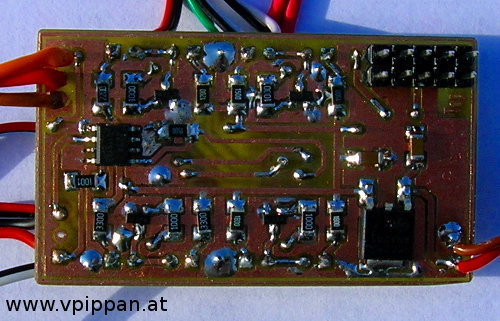
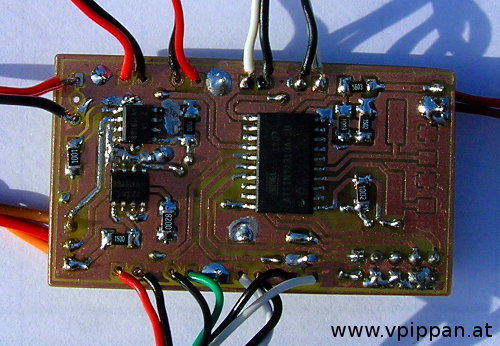
Um den Platzbedarf und das Gewicht möglichst gering zu halten, ist die gesamte Schaltung in SMD Technik aufgebaut. Für einen der üblichen PCB Fertiger sollte die Platine eigentlich kein Problem darstellen. Die folgenden Bilder zeigen meine selbst geätzte und gebohrte Platine. Die verwendeten Leiterbahnbreiten (0,5 mm)
und Leiterbahnabstände (0,4 mm) sind selbst mit meiner primitiven Ausrüstung sicher zu beherrschen. Mit etwas Erfahrung stellen auch die Lötarbeiten (trotz der SMD Bauweise) kein Problem dar. Es ist lediglich darauf zu achten sauber zu arbeiten. Sehr hilfreich zur Kontrolle ist eine Lupe.
Einzig die Optokoppler stellten sich als schwierig zu löten heraus, aber auch dies ist ohne Kurzschlüsse zu schaffen.
Wie auf den Bilder zu sehen können die Anschlusskabel direkt angelötet werden, oder die Platine wird mit Stiftleisten als Steckverbindung aufgebaut. Als Gehäuse für die fertige Platine dient ein Stück Schrumpfschlauch.
RevA
Technische Daten:
- Abmessungen der Platine: 52 x 30 mm
- Masse: 10 g (ohne Akku, LEDs und Kabel)
- Leiterbahnbreiten 0,5 und 0,7 mm (für Versorgungsleitungen), Leiterbahnabstände 0,4 mm
- Durchkontaktierung außen 1,4 mm und Bohrung 0,8 mm
- Ein Eingang für das Empfängersignal, über Optokoppler getrennt (3 bis 6 V)
- Vier Ausgangskanäle, zwei Anschlüsse pro Kanal
- Ein Ausgang für Jeti Telemetrie, über Optokoppler getrennt (3 bis 6 V)
- Eigene Spannungsversorgung zur Trennung vom Empfängerstromkreis (5,7 bis 10 V)
- Überwachung der Akkuspannung
RevB
Im Vergleich zu RevA hat sich nur wenig geändert. Der 10 polige ISP Stecker ist durch einen 6 poligen ersetzt. Weiters wurde die Spannungsversorgung des μC mit einem Stützkondensator und einer Filterspule versehen, um störendes Rauschen (verursacht durch den μC) besser zu unterbinden. Die Beschaltung der Optokoppler (für Datenübertragung zum Jeti System) war in RevA falsch. Dies fiel bis jetzt nicht auf, da ich noch keine Zeit hatte damit zu experimentieren. Nun sollte es stimmen und funktionieren. Allerdings ist es noch nicht getestet!
Software
Die Software ist in C geschrieben und steht unter der GPLv3. Die aktuelle Version (20130902) ist geeignet für die Hardware Versionen RevA und RevB. Weitere Details zur Software erfahren Sie in der Software Dokumentation.
 Versuchsaufbau zur Software Entwicklung
Versuchsaufbau zur Software Entwicklung
Eigenschaften der Software:
- Erkennung des Empfänger Eingangssignals über einen eigenen Timer
- Im Sourcecode einstellbare Schaltzeitpunkte
- Verwendung des Watchdog Timers um zu erkennen ob ein Empfänger Eingangssignal vorhanden ist
- Wenn kein Empfängersignal vorhanden: Abschalten der Beleuchtung und warten auf ein neues Empfängersignal
- Überwachung der Akkuspannung mit einem Komparator
- Bei Akku Unterspannung: Abschalten der Beleuchtung und in den Schlafmodus gehen
- Erzeugen der Blinkfrequenz über einen eigenen Timer
- Im Sourcecode konfigurierbare Blinkfolge und Blinkfrequenz
- Schlafmodus (zum Energiesparen) wenn nichts zu berechnen ist
Downloads
Dokumentation:
- Projektdokumentation (PDF) (v20140830)
- Projektdokumentation komplett (TAR/BZIP2) (v20140830)
Hardware:
- CAD Daten (KiCAD/TAR/BZIP2) (RevB – v20130809)
Software:
- μC Software komplett (TAR/BZIP2) (v20130902)
Links
- Beschreibung (Englisch) vom Jeti Protokoll
- Positionslicht (Wikipedia)
- Vorschriften über die von Luftfahrzeugen zu führenden Lichter (Anlage 1 zur Luftverkehrs-Ordnung (zu §§ 17 und 19 Abs. 7 LuftVO)) (bundestag.github.io)
- Licht an! Was bedeutet die Beleuchtung am Flugzeug? (aviation-friends-hamburg-forum.de)
- Flugzeugbeleuchtung (wiki.flightgear.org)
- Schnelleinführung in die Modellflug Beleuchtung (optotronix.de)
- Beleuchtung (aviation4u.de)
Versionsgeschichte
- Dokumentation Standard (v20140830):
- Fehler in Tabellenbeschriftung korrigiert - Dokumentation Standard (v20140614):
- Neuer Projektname und daher Dateien entsprechend umbenannt und geändert
- Projektversionierung nochmals geändert
- Dokumentation mit LaTeX geschrieben anstatt eines Spreadsheets - Dokumentation Standard (v20131212):
- Datum zur Hardware Revision hinzugefügt
- Bemaßungen von Layer Comments User auf Layer Drawings User verschoben - Dokumentation Standard (v20131112):
- Berechnung für Spannungsregler hinzugefügt
- maximale Eingangsspannung im Schaltplan geändert - Software Standard (v20130902):
- Blinken, Akku Spannungsüberwachung und Erkennung ob Empfängersignal vorhanden hinzugefügt - Hardware Standard (RevB – v20130809):
- Fehler bei der Jeti Optokoppler Beschaltung korrigiert
- ISP Stecker von 10 polig auf 6 polig geändert
- Stützkondensator und Filterspule zur Spannungsversorgung des μC hinzugefügt - Hardware Standard (RevA – v20130624):
- Erste veröffentlichte Version - Software Standard (v20120612):
- Erste veröffentlichte Version
